Моделирование смесительного трёхходового регулирующего клапана¶
Моделирование разделительного трёхходового регулирующего клапана см. в [3].
Рассмотрим систему подачи воды потребителям, состоящую из бака сырой воды (БСВ), насоса сырой воды (НCВ), подогревателя сырой воды (П) и трёхходового смесительного регулирующего клапана (РК).
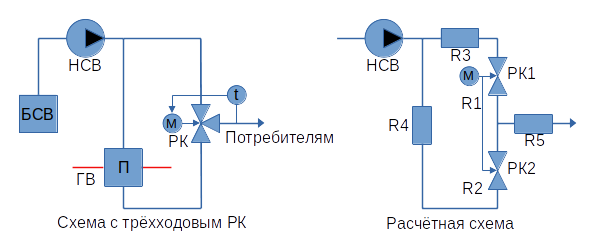
Смесительный трёхходовой регулирующий клапан предназначен для поддержания заданной температуры $t$ подаваемой потребителям сырой воды. РК регулирует соотношение расходов через подогреватель (к которому для нагрева сырой воды подаётся горячая вода (ГВ)) и через байпасную линию и смешивает два потока.
На правом рисунке приведена расчётная схема, в которой трёхходовой регулирующий клапан представлен двумя двухходовыми.
R - гидравлическое сопротивление участка трубопровода (более подробно см. [1]).
В нормальном режиме работы РК полностью открыт (относительное положение штока $\bar h = 1$) и подача всего объёма воды происходит через байпасную линию. В расчётной схеме открытому РК соответствуют открытый РК1 ($\bar h_1 = 1$) и закрытый РК2 ($\bar h_2 = 0$). При открытии РК2 на $\Delta \bar h$ РК1 закрывается на ту же величину $\Delta \bar h$.

